
400-000-7337
 值班热线
值班热线
 微信咨询
微信咨询

 官方网店
官方网店




工业机器人是现代智能制造的核心装备,其动作的精准度、稳定性和可靠性直接决定了生产线的效率和产品质量。在工业机器人的控制系统中,固态继电器正以其高速响应、无触点长寿命、抗振动冲击等特性,成为伺服驱动、末端执行器、安全保护等关键环节的理想选择。本文将深入探讨固态继电器在工业机器人中的精密控制应用。
工业机器人的工作环境和工作方式,对电气控制元件提出了严苛要求:
高速响应:现代工业机器人的动作速度越来越快,关节伺服电机的PWM控制频率可达16kHz以上,要求控制元件具备微秒级的响应能力。传统电磁继电器的毫秒级响应速度根本无法满足要求。
超高寿命:工业机器人常年24小时运行,关节动作频繁,伺服驱动器的开关次数可达数十亿次。传统继电器的机械寿命(10⁵-10⁶次)远远不够,而固态继电器的理论寿命可达10⁹次以上。
抗振动冲击:机器人在高速运动时会产生持续振动和冲击,普通继电器的触点容易抖动甚至误动作。固态继电器无机械部件,天生抗振,可耐受5G以上振动和50G冲击。
电磁兼容性:机器人控制系统中有大量敏感电子设备,要求控制元件电磁干扰*低。固态继电器的过零触发技术可大幅降低EMI,满足严苛的电磁兼容要求。
体积与重量:机器人关节空间*为有限,要求控制元件小型化、轻量化。固态继电器的功率密度远高于传统继电器,更适合紧凑安装。
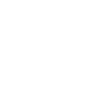
伺服驱动器是工业机器人的“肌肉”,负责控制伺服电机的运转。固态继电器在伺服驱动器中担任多种角色:
母线预充电控制:伺服驱动器上电瞬间,母线电容相当于短路,会产生*大浪涌电流。固态继电器控制的预充电电路,通过限流电阻给电容缓慢充电,待电压升至设定值后接通主回路。相比传统接触器,固态继电器的毫秒级响应可以精确控制预充电时间,避免电流冲击。
制动电阻控制:伺服电机减速或刹车时会产生再生能量,需要通过制动电阻消耗。固态继电器控制制动电阻的投切,其高频开关能力可以实现再生能量的连续调节,确保母线电压稳定。
电源软启动:固态继电器可以实现伺服驱动器的软启动,平滑建立母线电压,减少对电网的冲击。
在一些高性能伺服系统中,固态继电器直接参与电机绕组的电流换向控制。其纳秒级响应速度和高频开关能力,是实现高精度电流控制的关键。
某工业机器人制造商在其新型六轴机器人中采用了固态继电器控制的伺服驱动方案,实测显示电流环响应时间从50微秒缩短至10微秒,轨迹跟踪精度提升30%。
末端执行器是机器人与工件直接交互的部件,包括夹爪、焊枪、涂胶枪、打磨头等。固态继电器在这些装置中发挥着关键作用:
电动夹爪需要根据工件大小和材质精确控制夹持力和夹持速度。固态继电器控制的PWM调速电路,可以实现夹爪电机的无级调速,使夹持动作平稳柔和,避免损坏工件。
某3C电子制造企业的手机装配线上,采用固态继电器控制的电动夹爪,夹持力控制精度达到±0.1N,产品良率从95%提升至99%。
虽然气动系统通常使用电磁阀,但电磁阀本身也需要电气控制。固态继电器作为电磁阀的驱动元件,其快速响应和无触点特性,可以精确控制压缩空气的通断时序,实现高速、精准的动作。
在高速贴片机上,固态继电器控制的吸嘴电磁阀,每秒可完成数十次拾放动作,完全满足贴片速度要求。
焊接机器人对焊枪的控制要求*高。固态继电器在焊枪控制中担任多种角色:
焊接电流控制:固态继电器的高速开关能力,可以实现焊接电流的精确调节,适应不同材料和厚度的焊接需求
保护气控制:精确控制保护气的通断时序,确保焊接质量
电*压力控制:控制气动或伺服电*压力机构,保证焊接一致性
涂胶机器人需要精确控制胶水的流量和启停。固态继电器控制的涂胶枪,可以实现胶水启停的瞬间响应,避免拉丝和滴漏,保证涂胶轨迹的精确性。
工业机器人安全性至关重要,固态继电器在安全保护系统中发挥着不可替代的作用:
急停是机器人*重要的安全功能。固态继电器控制的急停回路,可以在紧急情况下在微秒级内切断机器人动力电源,比传统接触器快数十倍,为操作人员争取宝贵时间。
更重要的是,固态继电器的无触点特性彻底消除了触点粘连的风险。传统接触器在频繁急停测试后,触点可能因电弧而粘连,导致急停失效。而固态继电器没有触点,从根本上消除了这一隐患。
机器人工作区域通常装有安全光幕或区域扫描仪,当人员进入危险区域时,必须立即停止机器人运动。固态继电器作为安全信号的执行元件,其快速响应能力确保安全保护功能及时生效。
机器人关节通常配备电磁抱闸,用于断电时保持位置。固态继电器控制的抱闸电路,可以精确控制抱闸的释放和锁紧时序,确保机器人启动平稳、停止可靠。
机器人控制柜内集成了大量电气元件,固态继电器在控制柜中有着广泛应用:
现代机器人控制柜的I/O模块大量采用固态继电器作为输出元件。相比传统继电器输出模块,固态继电器输出模块具有以下优势:
无噪音:开关无“咔哒”声,适合安静工作环境
长寿命:理论寿命无限,无需更换
高响应:微秒级响应,适合高速控制
高密度:体积小,可实现高密度安装
控制柜内有多种辅助电源,用于给不同电路供电。固态继电器负责这些辅助电源的启停控制,实现控制柜的智能电源管理,在待机时切断非必要电源,降低能耗。
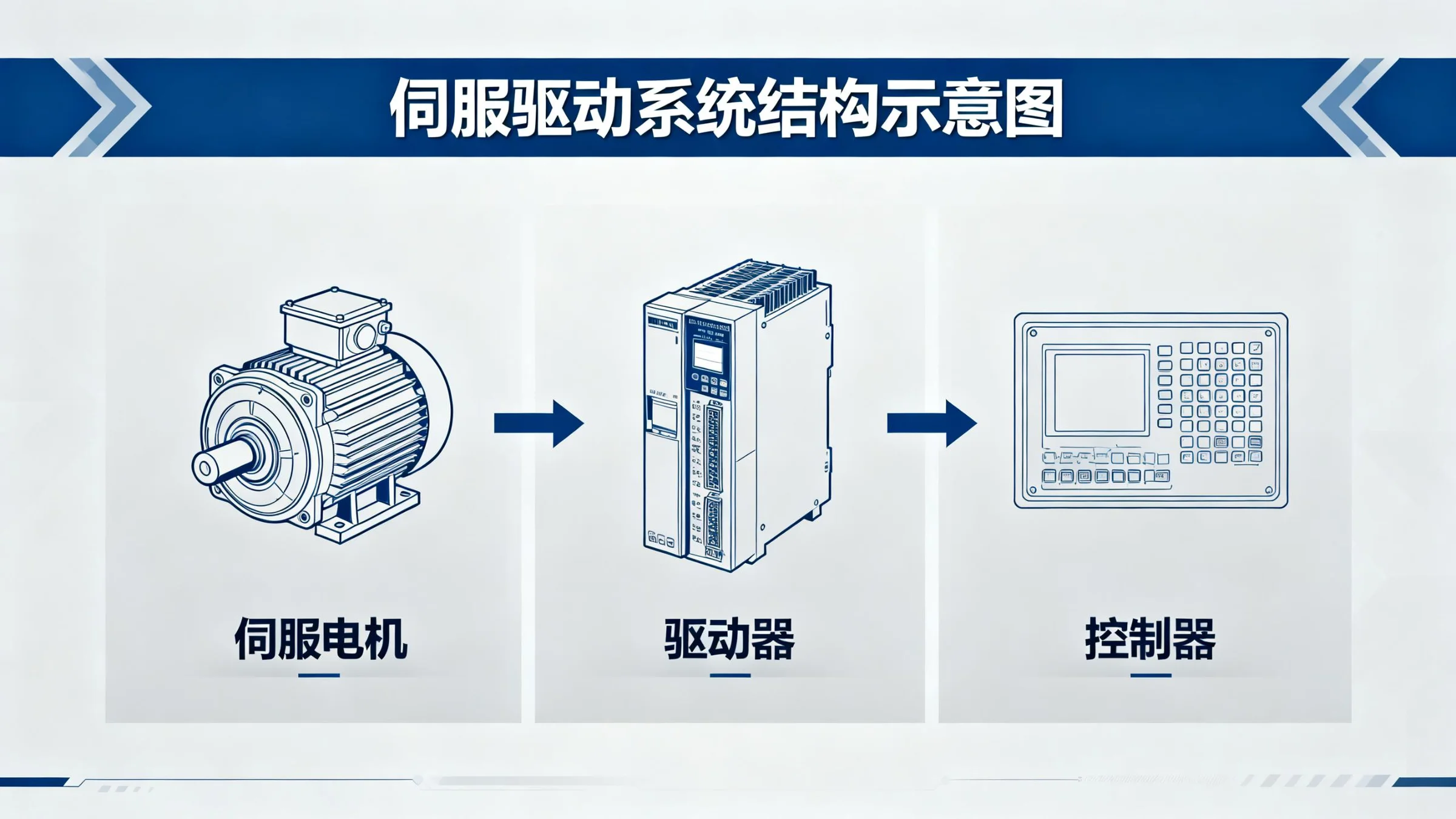
控制柜散热风扇需要根据柜内温度自动启停和调速。固态继电器控制的PWM调速电路,可以实现风扇的无级调速,既保证散热效果又降低噪音和能耗。
协作机器人(Cobot)是近年来快速发展的机器人类型,设计用于与人协同工作。这类机器人对安全性和人机交互体验要求更高,固态继电器的应用也更为深入:
协作机器人通常配备碰撞检测功能,当检测到与人碰撞时立即停止。固态继电器的高速响应能力,确保从检测到碰撞到机器人停止的时间在毫秒级内,*大限度减少碰撞伤害。
协作机器人常采用力控技术,根据接触力大小自动调整运动。固态继电器控制的伺服驱动电路,可以实现力控的精确调节,使机器人动作柔顺,与人协作更安全。
协作机器人通常部署在人员密集场所,对噪音要求苛刻。固态继电器的无触点设计,使机器人运行时没有继电器切换的“咔哒”声,营造安静的工作环境。
为工业机器人选择固态继电器时,需要特别关注以下参数:
开关频率:伺服驱动和PWM控制需要高频开关能力,普通工频SSR无法满足。应选择高频型SSR,开关频率可达数十kHz。
响应时间:精密控制需要纳秒至微秒级的响应速度,应根据具体应用选择合适的响应时间规格。
过载能力:电机类负载启动电流大,需要选择具有足够浪涌承受能力的SSR,通常要求浪涌电流为额定电流的10倍以上。
宽温工作:机器人关节内部温度较高,需要选择工作温度范围宽的SSR,通常要求-40℃至+85℃。
抗振能力:机器人运动时振动大,应选择无活动部件的SSR,并要求通过相应的振动和冲击测试。
电磁兼容性:机器人控制系统对EMI敏感,应选择过零触发型或具有EMI抑制功能的SSR。
随着工业机器人向更高速、更精密、更智能的方向发展,固态继电器技术也在不断演进:
更高功率密度:采用SiC、GaN等宽禁带半导体技术,开发体积更小、功率密度更高的SSR,适应机器人关节对空间和重量的*致要求。
集成化智能SSR:将电流检测、温度监测、通信接口集成在SSR内部,使SSR成为机器人的智能节点,支持预测性维护和状态监控。
功能安全认证:开发符合ISO 13849、IEC 61508等功能安全标准的SSR,满足安全机器人应用要求。
无线控制:对于机器人末端执行器等旋转部件,开发无线控制的SSR,解决滑环布线难题。
工业机器人是智能制造的核心装备,其性能水平直接影响制造业的竞争力。固态继电器以其高速响应、超长寿命、抗振抗冲击等特性,在伺服驱动、末端执行器、安全保护等关键环节发挥着不可替代的作用。
随着机器人技术向更高性能发展,对控制元件的要求也将不断提高。固特电气将持续投入研发,开发更高性能、更智能化的固态继电器产品,为工业机器人产业提供可靠的核心元器件支撑,助力智能制造的发展。


地址:江苏省无锡市胡埭工业区联合路10号C幢5楼
24小时销售专线:
外贸热线:400-000-7337

企业公众号